Product Description
Features:
Welding software package
Swing function
Multilayer multichannel function *
Location finding function *
Arc tracking function *
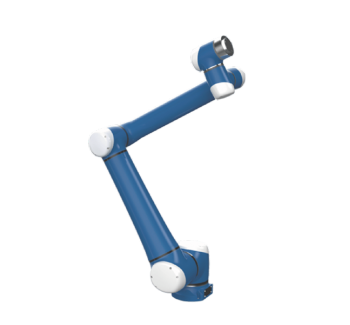
1. Robot Arm Specifications — CRP-RC13-10-W
| Item |
Specification |
| Model |
CRP-RC13-10-W |
| Number of Axes |
6 |
| Payload Capacity |
10 kg |
| Operating Radius |
1360 mm |
| Repeat Positioning Accuracy |
±0.02 mm |
| Absolute Accuracy |
≤ 0.3 mm |
| Body Weight |
Approx. 33 kg |
| Installation Methods |
Floor-mounted / Ceiling-mounted (upside down) / Wall-mounted |
| Protection Rating |
IP54 |
| Operating Temperature |
0°C ~ 45°C |
| Operating Humidity |
20% ~ 80% RH (non-condensing, no frost/dew) |
Joint Motion Range
| Axis |
Motion Range |
| J1 |
±360° |
| J2 |
±360° |
| J3 |
-78° ~ 256° |
| J4 |
±360° |
| J5 |
±360° |
| J6 |
±360° |
Maximum Joint Speed
| Axis |
Maximum Speed |
| J1 |
107°/s |
| J2 |
107°/s |
| J3 |
200°/s |
| J4 |
250°/s |
| J5 |
250°/s |
| J6 |
250°/s |
End Effector & I/O
| Item |
Specification |
| End Buttons |
2 |
| End I/O Ports |
4 digital input/output ports |
| Breathing Light |
1 |
| Towing Device |
Included |
Programming & Operation Features
| Item |
Specification |
| Programming Buttons |
ARC, MOVL, Toggle (XYZ/ABC), MOVC, RES, MOVJ |
| Joystick / Rocker |
Arbitrary direction control |
2. CRP-X2 Robot Control Cabinet Specifications
| Item |
Specification |
| Model / Series |
CRP-X2 |
| Control Axes |
6-axis control |
| Bus Extension |
EtherCAT bus extension (external axis optional) |
Demonstrator / Teach Pendant
| Item |
Specification |
| Features |
Touch screen, emergency stop button, mode selector switch, safety switch, shortcut keyboard |
| Communication Type |
Type-C network demonstrator |
| Standard Cable Length |
6 meters |
| Display |
8-inch TFT-LCD touch screen |
| Dimensions |
156 (W) × 310 (H) × 50 (D) mm |
| Weight |
0.88 kg |
Safety Features
| Item |
Specification |
| Robot Safety Functions |
External emergency stop, servo power shutdown |
Communication Protocols
| Item |
Specification |
| Supported Protocols |
Modbus RTU, Modbus TCP |
Operation Modes
| Item |
Specification |
| Modes |
Teaching, playback/reproduction, remote control |
| Motion Types |
Point-to-point, linear interpolation, circular interpolation, gate motion |
Instruction & Coordinate Systems
| Item |
Specification |
| Instruction Types |
Motion, logic, process/craft, arithmetic |
| Coordinate Systems |
Joint, Cartesian, User, Tool, Base coordinates |
EMC Standard
| Item |
Specification |
| EMC Compliance |
IEC 61000-6-2:2016 |
3. Megmeet Welding Power Source — Ehave CM350 / CM350AR
| Item |
Specification |
| Model |
Ehave CM350 / Ehave CM350AR |
| Control Mode |
Full Digital |
| Input Voltage |
3-phase 380 VAC ±25% (285 ~ 475V) |
| Input Frequency |
30 ~ 80 Hz |
| Input Capacity |
13.5 kVA |
| Rated Open-Circuit Voltage |
63.7 V |
| Rated Output Current |
30 ~ 400 A |
| Rated Output Voltage |
12 ~ 38 V |
| Rated Duty Cycle |
100% @ 350A @ 40°C |
| Welding Methods |
CO₂ / MAG / MMA |
| Supported Wire Types |
Solid wire, flux-cored wire, electrode |
| Supported Wire Diameter |
Ø0.8 / 1.0 / 1.2 mm |
| Welding Sequences |
2T, 4T, Special 4T, Spot Welding |
| Welding Parameter Channels |
10 sets (default) |
| Arc Dynamic Adjustment |
-9 ~ +9 |
| Communication |
Analog |
| Reserved Communication Interface |
CAN Bus |
| Cooling Mode |
Intelligent Gas Cooling |
| Wire Feed Speed |
1.4 ~ 24 m/min |
| Protection Class |
IP23S |
| Operating Environment |
Heavy-duty industrial environment (-39°C ~ +50°C) |
| Dimensions |
300 × 480 × 620 mm |
| Weight |
52 kg |
4. COBOT Magnetic Base
| Item |
Description |
| Application |
Portable base for COBOT welding |
| Features |
Easy installation |
|
Easy relocation |
5. COBOT Magnetic Base
| Item |
Description |
| Application |
Portable base for COBOT welding |
| Features |
Easy installation |
|
Easy relocation |
6. Mobile Cart with Wheels
| Item |
Description |
| Structure |
Steel structure |
| Mobility |
Equipped with 4 wheels |
| Compatibility |
Suitable for COBOT welding systems |
7. Workmanship and Travelling
| Item |
Description |
| Scope of Work |
Supply of labor and tools for setup, installation, and commissioning of the robot system |
| Travel Expenses |
Included |
| Robot Installation & Commissioning |
3 days |
| On-Site Training |
2 days |
CATALOG DOWNLOAD HERE




Reviews
There are no reviews yet.